On the 2nd of April, 2017, I lead a group of 5 students to Cambridge for a competition called the PiWars. We got the 7th position in the competition. One thing to notice is that our score was 204 and the 4th position in the Piwars was 207. Our team was so close to the 4th position.
The Competition:
The competition is round-based. Rules can be found here.
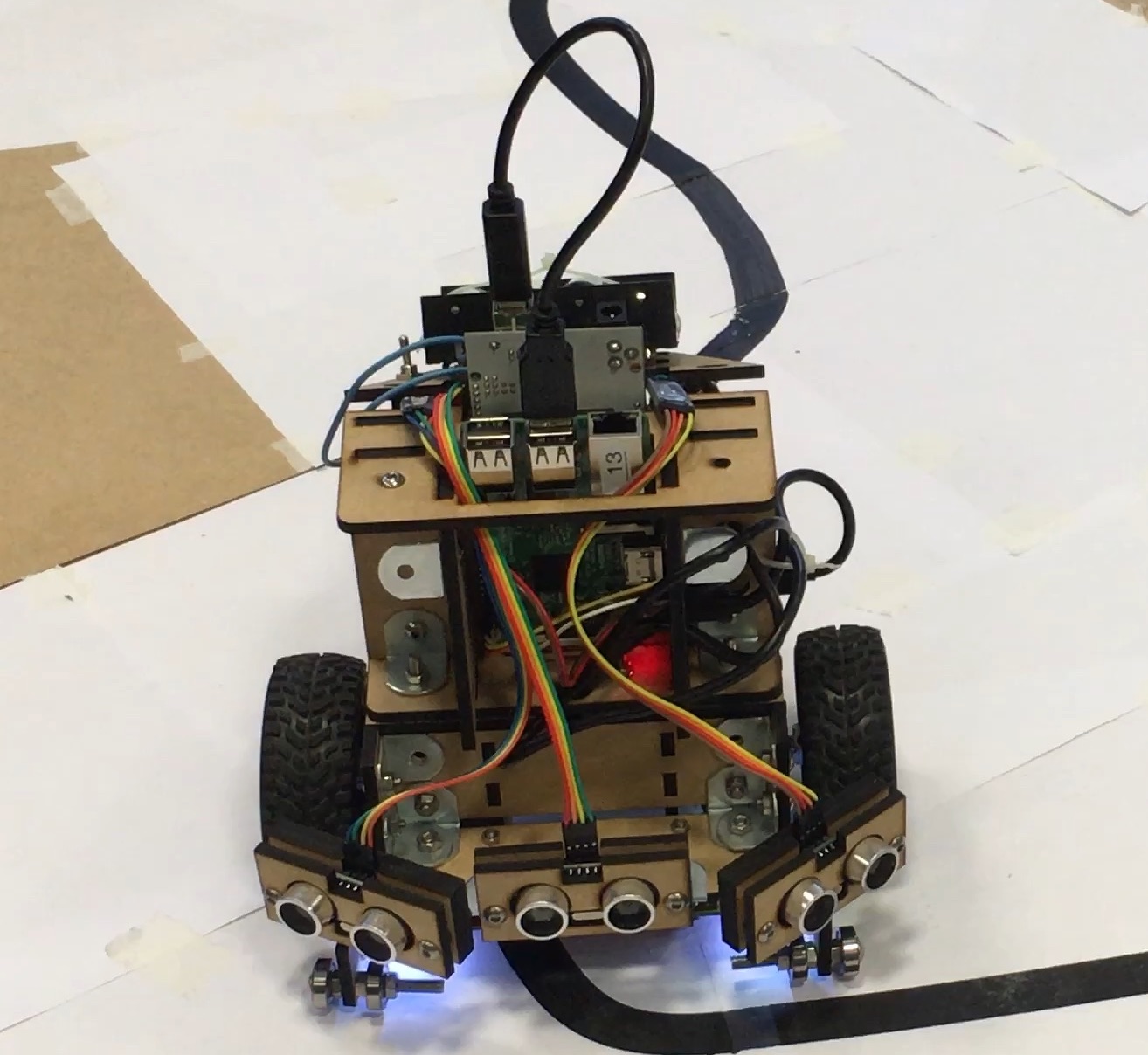
Our Rover:
The rover was built with laser-cut plywood. A raspberry pi was used to receive control signals and execute control commands. L298N was the H-bridge driver for the motors. The power for the raspberry pi was supplied via a compact power bank and the power for the motors was supplied via 4 18650 Lithium ion batteries. The sensors’ readings were first processed by an Arduino Mega 2560 and sent to the Raspberry pi.